

Bitte fragen Sie nach besonderen Spezifikationen
Benötigen Sie ein individuelles Design?
Wir bieten verschiedene Variationen an, um spezifische Größen- und Konfigurationsanforderungen zu erfüllen.
Der kartesische Roboter bietet eine Vielzahl an Funktionen und zahlreiche Hubkombinationen
Der kartesische Roboter der JC-3 Serie bietet zahlreiche Funktionen sowie eine einfach zu bedienende Steuerung und eine Robotereinheit mit einer reichhaltigen Auswahl an Hublängen pro Achse.
Wie unsere Tisch-Roboter bietet auch der JC-3 bequeme Installationseinstellungen. Die Programmierung ist sehr einfach. Dank der interaktiven Programmiertafel kann auf komplizierte Einstellungen verzichtet werden.
Dank unseren speziellen technischen Daten für das Anziehen für Schrauben sowie der Dosierung wird die Programmierzeit für Anwendungen zum Anziehen der Schrauben oder für die Dosierung deutlich verkürzt. Außerdem bieten wir eine äußerst vielseitige Software für die Standardausführung.
Dank der vielfältigen Schnittstellen können externe Geräte problemlos angeschlossen werden.
Das Modell verfügt über eine einfache, integrierte PLC, die unabhängig von den Roboterfunktionen bedient werden kann. Somit bestehen bereits Schnittstellen zu externen Geräten und eine separate PLC muss nicht gekauft werden.
Die JC-3 Serie verwendet Schrittmotoren mit Feedback-Steuerung für die X- und Y-Achsen.
Die Traglast beträgt bis zu 8 kg, die maximale Beschleunigung liegt bei 5000mm/s2 und die Höchstgeschwindigkeit bei 800mm/s.
Ein Ethernet-Port (LAN) sowie 3 COM-Ports (RS2323C) sind standardmäßig integriert. Ein optionaler Feldbus-Port kann installiert werden (verfügbare Typen: CC-Link, DeviceNet, PROFIBUS, EtherNet/IP, PROFINET und CANopen).
Sie können nicht nur eine Programmnummer festlegen und über die PLC ausführen, sondern auch Positionskoordinaten festlegen und die Roboterachsen bewegen und die Positionsdaten in bestehenden Programmen neu festlegen.
Erweiterte Kamerafunktionen für Montageeinrichtungen mit hohen Präzisionsansprüchen.
Zusätzlich zur hilfreichen Positionskorrektur wurden auch weitere Funktionen ergänzt, wie z. B. automatische Kalibrierung und eine CCD-Kamerajustierung.
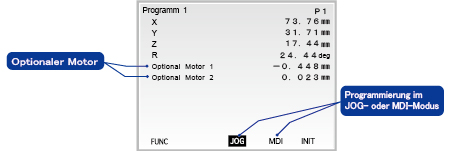
Programmierung von bis zu 2 Schrittmotoren oder per Servomotor angetriebene Geräte mit "Pulsfolgen für den Eingabetyp" über die Programmiertafel, gemäß dem von Roboterachsen bekannten Verfahren.
Dank unserer speziellen Anwendungssoftware ist die Programmierung für die "Technischen Daten zum Verschrauben" und für die "Dosierung" sehr einfach. Zum Erstellen von Programmierdaten basierend auf DXF-Dateien oder Gerber-Daten bei Verwendung von "JR C-Points II" PC-Software.
Für die Programmierung über die JOG-Bewegung bieten wir eine optionale Programmiertafel.
Zur Unterstützung der Benutzer aus verschiedenen Ländern kann eine der 11 integrierten Anzeigesprachen auf der Programmiertafel des Roboters ausgewählt werden: Deutsch, Japanisch, Englisch, Französisch, Italienisch, Spanisch, Koreanisch, Vereinfachtes Chinesisch, Traditionelles Chinesisch, Tschechisch und Vietnamesisch.
Mithilfe des Encoders behält der Roboter seine Position. Eine Initialisierung beim Wechseln des Programs ist nicht notwendig.
*1 Das Absolut Encoder-Modell ist nur mit 3 Achsen erhältlich.
Dank der anwendungsspezifischen Software kann der Roboter auch von Anfänger problemlos programmiert werden. Die Befehle wurden sogar erweitert, um Ihnen eine große Auswahl bieten zu können.
Gute Nachrichten für Kunden, die ein Kamerasystem zur Positionsanpassung benutzen möchten. Die Kamerajustierung, einst ein aufwendiger Prozess die Kamera- und Roboterkoordinaten aufeinander abzustimmen, ist jetzt einfacher gestaltet. Registrieren Sie die Kalibriermarkierungen auf der Kameraseite und Roboter und Kamera sind aufeinander abgestimmt.
Kompatible Kameras*2
Panasonic A110・A210、PV200・PV260・PV300・PV500
Keyence CV3000・CV-X100・CV-X200・CV-X400、XG-8000・XG-X Serie
OMRON FH Serie・FQ Serie
*2 Manche Kameramodelle werden nicht mehr produziert. Weitere Informationen erhalten Sie vom Hersteller.
Nutzen Sie die Kamera für Positionsjustierungen. Dadurch können gleichzeitig weitere Funktionen ausgeführt werden. Der Roboter kann bis zu 3.000 Positionsjustierungen vornehmen. Wenn ein Werkstück beispielsweise auf einer Pallette liegt, müssen anstelle der bisherigen Schritte "Bildgebung"→"Arbeit"→"Bild von nächstem Werkstück aufnehmen"→"Arbeit für nächstes Werkstück ausführen" nur noch die Schritte "Gruppenbild aufnehmen"→"Arbeit für Gruppe ausführen" ausgeführt werden, wodurch die Bearbeitungszeit deutlich reduziert wird.

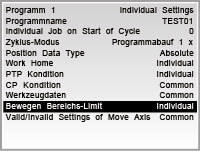
Einstellungen, die für alle Programme identisch sind, wie z. B. "Startseite Arbeit", "Flächebegrenzung verschieben", "Bedingungen PTP-Bewegung" usw., können nun allgemein festgelegt werden. Durch diese einmalige Einstellung wird die Programmierzeit wesentlich verkürzt. Sofern gewünscht, können Sie diese Einstellungen selbstverständlich auch individuell ändern.
Der Roboter zeichnet die Position der Dosierdüsenspitze auf. Kommt es beim Austausch der Nadel zu einer Positionsabweichung, kann der Roboter über die Funktion "Nadeljustierung" die Differenz bestimmen und die Position der Düsenspitze so anpassen, dass die Dosierung wie im Zustand vor dem Austausch ausgeführt wird. Zusätzlich zum 3-Achsen-Typ ist diese Funktion nun auch für alle 4-Achsen-Typ verfügbar. Diese neue Funktion empfehlen wir allen Kunden, denen die manuelle Justierung der Düsenposition zu viel Aufwand ist.

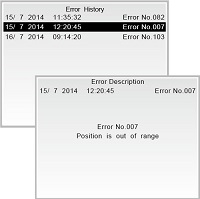
Datum und Uhrzeit, wann der Fehler aufgetreten ist, kann am Bildschirm angezeigt werden.
Durch die Mitteilung des Roboters, wann der Fehler aufgetreten ist, kann die Fehlerursache schneller gefunden werden.
In der Fehlerhistorie werden die letzten 1.000 Fehler gespeichert.
Das Modell verfügt über eine einfache, integrierte PLC, die unabhängig von den Roboterfunktionen bedient werden kann. Somit bestehen bereits Schnittstellen zu externen Geräten und eine separate PLC muss nicht gekauft werden.
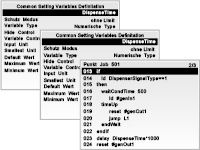
Create your own specialized software by registering the commands you often use in your point job data.
Mit unserer interaktiven Programmiersoftware, "JR C-Points II" können Sie Ihre Programmier- und benutzerspezifischen Daten auf dem PC erstellen, bearbeiten und speichern.
Problemlos können Sie nun Koordinatendaten wie in einer Tabellenkalkulationssoftware mit Kopieren und Einfügen bearbeiten, Punkte numerisch eingeben und Befehle für Punktaufgaben erstellen und bearbeiten. Mit der Funktion für die Bearbeitung von Punktgrafiken können Sie außerdem Pfaddaten erstellen und bearbeiten, wodurch die Programmierung sehr einfach wird.
Konvertieren der Programmierdaten von "JR C-Points" in "JR C-Points II" Daten.
①Programmierbereich
Geben Sie Werte direkt ein, um Programmdaten zu erstellen und zu bearbeiten.
②Bereich für allgemeinen Betrieb
Benutzen Sie die hilfreichen Icons zum einfachen Erstellen eines Programms.
③Anzeigebereich des Kamerabildes
*bei Verwendung einer USB-Kamera
Der Roboter bewegt sich um sich an der Position auszurichten, die auf dem Kameradisplay angklickt wurde.
④Bereich für Roboter-Betrieb
Benutzen Sie die Pfeiltasten, um JOG Bewegungen einfach auszuführen.
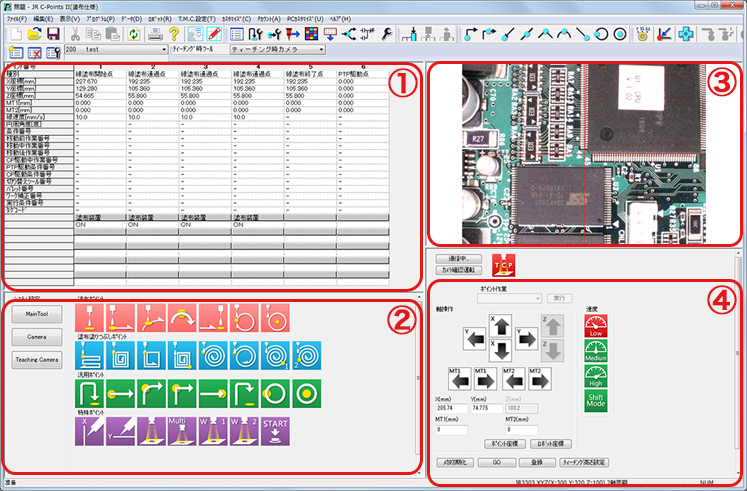
Präzises Teaching ist einfach! Schließen Sie eine handelsübliche USB-Kamera* an und setzen Sie Punkte mit Hilfe des vergrößerten Kamerabildes auf ihrem PC Bildschirm, benutzen Sie dafür die entsprechenden Icons.
*Für Informationen über passende USB-Kameras kontaktieren Sie uns bitte.
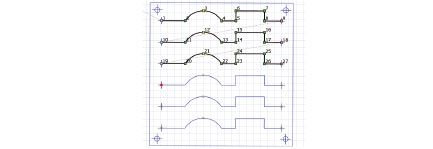
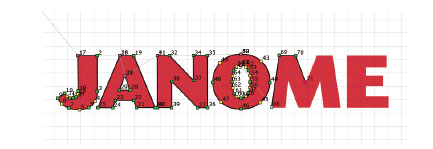
Programmierung der Punkte basierend auf DXF-Daten
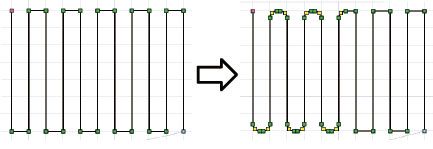
Einstellung der Punkte durch Ausrichtung an den Linien des Hintergrundbildes
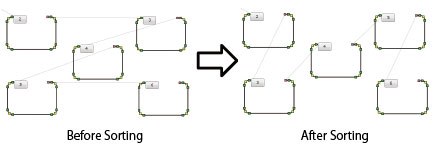
Der Bewegungsabstand zwischen den Punkten ist groß, daher erfolgt eine Sortierung von "links nach rechts"
Klicken Sie auf einen Verbindungspunkt, um einen Radius festzulegen.
Spezielle Software für Verschrauben und Dosieren.
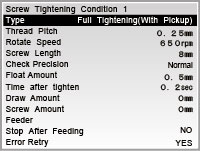
Programme zum Verschrauben können problemlos erstellt werden: Legen Sie hierfür lediglich die Parameter für das Anziehen der Schrauben, z. B. Spindelsteigung, Länge und rpm des Antriebs als Arbeitspositionen fest.
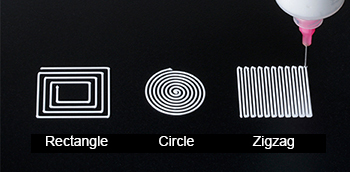
Das Erstellen von Dosierprogrammen ist einfach. Sie müssen lediglich die Positionen für die Dosierparameter, z. B. Punkt- oder Liniendosierung festlegen.
Entgraten

Entgratungswerkzeug mit unten angebrachter Absaugung zur Beseitigung der Späne.
Auf YouTube ansehenBenötigen Sie ein individuelles Design?
Wir bieten verschiedene Variationen an, um spezifische Größen- und Konfigurationsanforderungen zu erfüllen.
Testen Sie Ihren Prozess auf unseren Maschinen. Bitte kontaktieren Sie uns für weitere Informationen.